 EN
EN
 AR
AR
 HR
HR
 BG
BG
 FI
FI
 NL
NL
 DA
DA

Olemattomattomat välineet: Analysoimalla niiden keskeisiä rooleja vakiokentissä
Vakiot ovat olennaisia vakiokentissä. Autoteollisuudessa ne ovat keskeisiä vakiossa. Manuaalisissä vakiokentissä käytetään vakioita vaihteistoissa. Erilaiset vaihtoehto-combinaatiot mahdollistavat nopeuden ja väännöksen säätämisen eri ajo-oloissa, kuten kiihdyttäessä, kuljettamisessa tai nousussa. Kupfer-vakiot vähentävät melua ja värinnyttä parempaa ajo-kokemusta.
1, Vaihtoehtojen tyypit ja toiminnot
1.0. Vaihtoehtojen tyypit
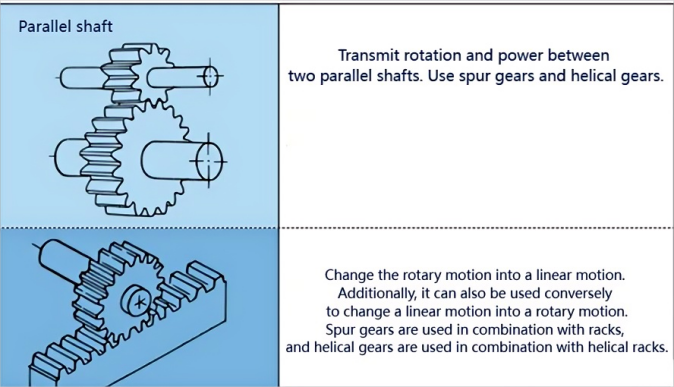
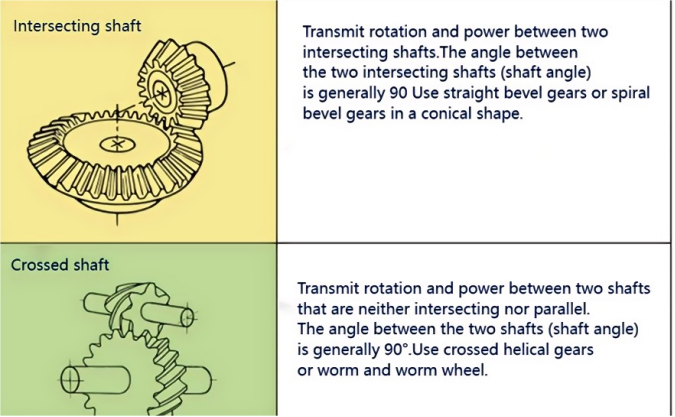
On olemassa lukuisia väliäkkeiden tyyppiä. Yleisin luokittelu tapa perustuu väliäkseen akseliin. Yleensä ne jaetaan kolmeen tyyppiin: rinnastus - akseli, leikkaus - akseli ja ristiriita - akseli. Rinnastus - akselien väliäkkeet sisältävät hampurit, kierrokselliset hampurit, sisäiset hampurit, rakat ja kierrokselliset rakat jne. Leikkaus - akselien väliäkkeet sisältävät suorat nyrkkivellokat, kierrokselliset nyrkkivellokat, nollasta - astetta nyrkkivellokat jne. Ristiriita - akselien väliäkkeet sisältävät risti - kierrokselliset hampurit, madonhampurit ja madonratat, hypoid - hampurit jne.
(Luokittelua ja tyyppejä väliäkkeille).
|
Väliäksien luokittelu |
Väliäksien tyyppi |
tehokkuus ((%) |
|
Rinnastettu akseli |
korvakoriste |
98.0-99.5 |
|
Pöytä |
||
|
Sisäinen hampurilankku |
||
|
Helikaalinen väri |
||
|
Kierroksellinen raka |
||
|
herringbone-vaihte |
||
|
Leikkaava akseli |
Suora kulmahampuri |
98.0-99.0 |
|
Katkoviivakoottain |
||
|
Nollasta - astetta nyrkkivellokki |
||
|
Ristiakseli |
Risteävät kirvesradat |
70.0-95.0 |
|
Sylinterimato ja matovaihe |
30.0-80.0 |
Tässä taulukossa luetellut tehokkuudet ovat siirtotehokkuuksia eivätkä sisällä menetyksiä käpistysten tai öljentymisen sekaanlaskemista jne. Suorien tai leikkaavien akselien radaparien meshaaminen perustuu pääosin vieritykseen, ja suhteellinen liukuminen on hyvin pieni, joten tehokkuus on korkea. Risteävillä akselilla oleville kirvesratoille ja matolle sekä matovaiheelle sekä muille risteäville akselille tuleville radapareille, koska pyöritys syntyy suhteellisen liukumisen kautta saavuttaakseen voiman siirron, kitkun vaikutus on erittäin suuri, ja siirtotehokkuus laskee verrattuna muihin radoihin. Radan tehokkuus on radan siirtotehokkuus normaaleissa montaustilanteissa. Jos montaus on virheellinen, erityisesti kun kulmakerroksen montaussyöstä on väärin ja on virhe konen leikkauspisteessä, sen tehokkuus vähenee huomattavasti.
2.0 Radan tehtävä Radat
Hinnettä täytyy käyttää pareittain, jotta ne ovat tehokkaita.
2.1 Siirtää mekaanisen liikkeen voiman: Monilla autoilla on monta hinnettä. Nämä hinnet voivat auttaa autojen tai muiden koneiden toimintaa. Esimerkiksi kuin auton vaihteisto ja teollisuuden vähennyslaukut jne. Hinnentoiminnan avulla ne voivat toimia normaalisti.
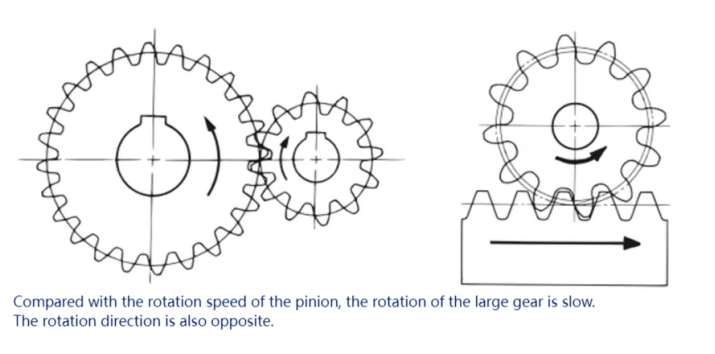
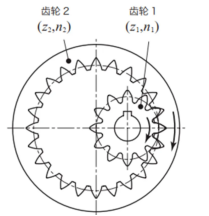
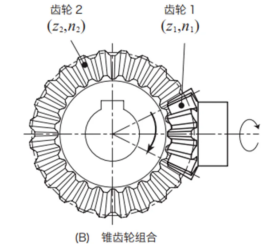
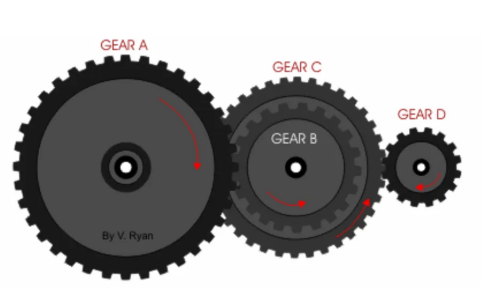
2.2 Muuttaa liikkeen suuntaa:
Seuraava kuva osoittaa erilaisten hinnegryppöiden aiheuttaman liikkeen suunnan muutoksen laki.
2.3 Muuttaa liikkeen nopeutta: Suuren ja pienen hinnegryppön asentaminen koneeseen voi tehdä niin, että kone kiihdyttää tai hidastaa nopeasti, kuten vähennyslaukuissa ja kiihdytyslaitteissa.
2.4 Muuttaa väännönmomenttia tai kiskoa: Suuren ja pienen hinnegryppöiden yhdistelmä muuttaa hinnetyönteen väännösmomenttia; (Tarkempaa selitystä löytyy alla olevasta kolmannesta kohtaa.)
2, Hinneparien siirtoasteet ja pyörähtämiskerrat
Väliluku on kahden pyörivän komponentin kulmakertoimien suhde mekanismissa, mikä tunnetaan myös nopeussuhteena. Komponenttien a ja b väliluku on i = ωa/ωb = na/nb, missä ωa ja ωb ovat komponenttien a ja b kulmakertoimet vastaavasti (radiaaneja sekunnissa); na ja nb ovat komponenttien a ja b pyörähdyssuhteet vastaavasti (kierrosta minuutissa).
1.Yksivaiheinen hampurake-mekanismi: Hampurakkeista muodostettu ketju, joka syntyy, kun pari hampuraketta liittyy toisiinsa, kutsutaan yksivaiheiseksi hampurake-mekanismiksi.
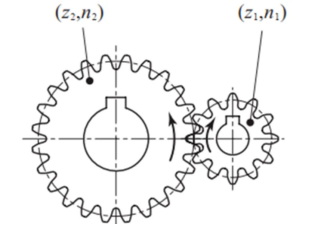
Oletetaan, että yksivaiheisen hampurake-mekanismin ajopiirren hampurakkeen hampuloiden määrä on z1, kierrosten määrä n1, vedonpiirren hampurakkeen hampuloiden määrä z2 ja kierrosten määrä n2. Väliluvun laskukaava on seuraava:
Väliluku = z2/z1 = n1/n2
Väliluvun arvon perusteella yksivaiheinen hampurake-mekanismi voidaan jakaa kolmeen luokkaan:
Väliluku < 1, nopeuskasvattava vaihteisto, n1 < n2
Väliluku = 1, vakionopeuden vaihteisto, n1 = n2
Väliluku > 1, nopeusvähennysvaihteisto, n1 > n2
2.0 Kaksitasoinen vaihteisto: Kaksitasoisen vaihteiston rakenne koostuu kahdesta yhden tasoon perustuvasta vaihteistosta.
Seuraava kuvaesitys näyttää kaksitasoisen vaihteiston rakenteen.
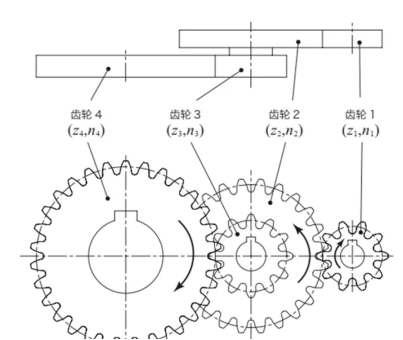
Väliluku = z2/z1 * z4/z3 = n1/n2 * n3/n4.
Alla on esimerkki kaksitasoisen vaihteiston väliluvun laskemisesta.
|
Seurannumero |
Tuote |
Koodi |
Kaava |
Laskuesimerkki |
|
|
PINION |
Iso käpy |
||||
|
1 |
Hammaslukumäärä (ensimmäinen vaihe) |
Z1,Z2 |
Asetettu arvo |
10 |
24 |
|
2 |
Hammaslukumäärä (toinen vaihe) |
Z3,24 |
12 |
30 |
|
|
3 |
Kierros (vaihte 1) |
N1 |
1200 |
- |
|
|
4 |
Siirtoaste (ensimmäinen vaihe) |
I1 |
Z2/Z1 |
2.4 |
|
|
5 |
Siirtoaste (toinen vaihe) |
i2 |
Z4/Z3 |
2.5 |
|
|
6 |
Väliluku |
I |
i1×i2 |
6 |
|
|
7 |
Kierrosnopeus (hymylyt 2 ja 3) |
n2 |
n1/i1 |
500 |
|
|
8 |
Kierrosnopeus (hymyli 4) |
N4 |
n1/i |
- |
200 |
|
Kierrosnopeuden yksikkö on pyör/min. Asetettu arvo on suunnittelijan esiasettama arvo. |
|||||
Kolme kertaa Suhteellinen riippuvuus voiman, tehojen ja kierrosnopeuden välillä
Katsoo ensin joitakin kaavoja ja ymmärrä niitä vaiheittain.
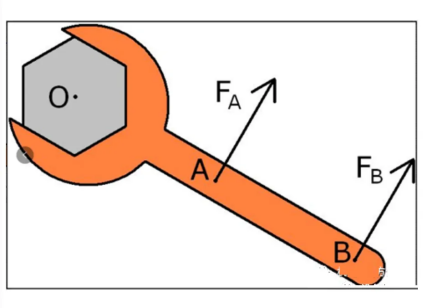
a. Fysiikassa voiman hetki, voiman hetki = voima × käännetyn kärkin pituus (suora). Voiman hetken laskukaava on M = L×F. Voiman hetken yksikkö on Newton - metri, lyhyesti N - m, symbolina N*m.
Käännetyn kärkin OA × voima Fa = käännetyn kärkin OB × voima Fb.
b. Kiertotilan suhteen pyöritysvoima (erityinen voiman hetki) = F (voima) × r (pyörivän säteen pituus), eli tangentialvoiman ja voiman pisteestä pyörityskeskukseen piirretyn ympyrän säteen tulosta. Pyöritysvoiman laskukaava on: M = F*r.
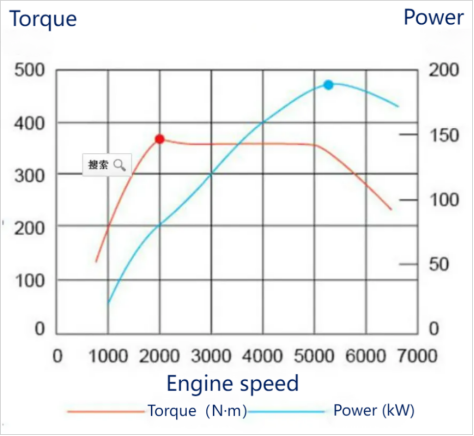
c. Pyöritysvoiman ja pyöritysnopeuden välinen suhde: T = 9550P / n, P = T * n / 9550; P on teho kilowatteina (kW); T on pyöritysvoima Newton - metreinä (N·m); n on pyöritysnopeus pyörinää minuutissa (r / min). 9550 on vakio.
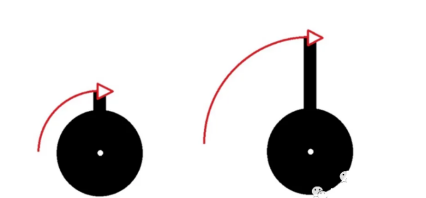
d. Tehon ja vääntömomentin sekä pyörähtymisnopeuden välinen suhde: Teho (kW) P = Vääntömomentti (N·m) T × Pyörähtymisnopeus (vrt/min) n/9550, eli P = T*n/9550, mikä voidaan ymmärtää seuraavan kuvan avulla.
Kuten voimakuljetuskaaviossa näkyy, teho pysyy samana (ohitetaan siirtotappiot), mutta pyörähtymisnopeus pienenee. Teho = vääntömomentti × pyörähtymisnopeus (*vakio), joten monta kertaa pyörähtymisnopeus pyörän lopussa pienenee, niin monta kertaa vääntömomentti pyörän lopussa kasvaa - tämä on niin sanottu "pyörän vääntömomentti".
e. Tehon ja vääntömomentin sekä kulmanopeuden välinen suhde: Teho P = vääntömomentti T × kulmanopeus ω.
Koska teho P = työ W ÷ aika t, ja työ W = voima F × matka s, niin P = F×s/t = F×suoraviivainen nopeus v. Tässä v on suoraviivainen nopeus. Moottorissa käyränheitin suoraviivainen nopeus v = käyränheitin kulmanopeus ω × käyränheitimen säde r.
Yllä olevan kaavan sijoittaminen antaa: teho P = voima F × säde r × kulmatero ω. Ja voima F × säde r = vääntömomentti. Siksi voidaan johtaa, että teho P = vääntömomentti × kulmatero ω. Niinpä moottorin tehon voi laskea vääntömomentista ja pyörähtämisnopeudesta.
Kuvan esimerkkejä.
Lisäsuhteet: Seuraavat koskevat tasapainoista pyörimisliikettä.
1. Suoraviivainen nopeus V = s/t = 2πR/T.
2. Kulmatero ω = Φ/t = 2π/T = 2πf.
3. Suoraviivaisten ja kulma-terojen välinen suhde: Suoraviivainen nopeus = kulmatero × säde, V = ωR.
4. Kulmateron ja pyörähtämisnopeuden välinen suhde ω = 2πn (tässä taajuus ja pyörähtämisnopeus tarkoittavat samaa).
5. Aika ja taajuus T = 1/f.
Pääfyysikaaliset suureet ja yksiköt: Kaari-pituus (S): metre (m); kulma (Φ): radiaani (rad); taajuus (f): hertzi (Hz); aika (T): sekunti (s); pyörähtämisnopeus (n): k/s; säde (R): metre (m); suoraviivainen nopeus (V): m/s; kulmatero (ω): rad/s.




